
传感器融合
概念
信息融合分类
信息融合的分类方法有多种,其中较为通用的一种方法是依据信息的抽象层次将其划分为三类,即数据层融合、特征层融合、决策层融合
-
数据层融合:每个传感器分别对目标进行观测,然后将各传感器的原始数据或者经过简单滤波处理的目标数据传输给融合中心;随后,融合中心对各种传感器的测量数据进行融合处理,提取目标特征,识别目标身份
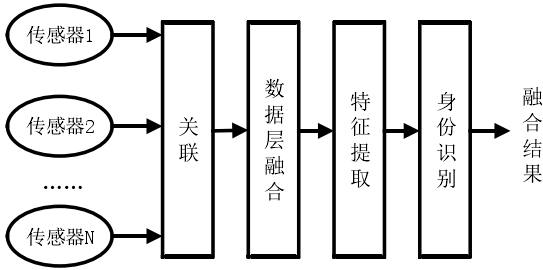
- 原始数据损失量较小,细节信息保存较为完整,精度相对较高
- 数据量较大,需要较多计算资源,实时性差
- 仅能对同质传感器融合
-
特征层融合:每个传感器需要对各自的原始数据进行处理,从中提取目标特征,然后再将数据传输给融合中心;随后,融合中心依据各传感器提取的目标特征进行数据关联,并进行目标数据融合与目标身份识别
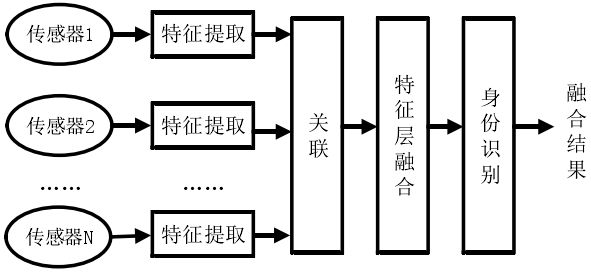
- 数据线明显减小,实时性提高
- 融合中心接收到的信号存在一定损失,融合精度会下降
-
决策层融合:每个传感器需要对各自的原始数据进行预处理,提取目标特征并进行身份识别,然后再将目标识别的结果传输给融合中心;融合中心只需要对识别的目标进行关联以实现数据融合
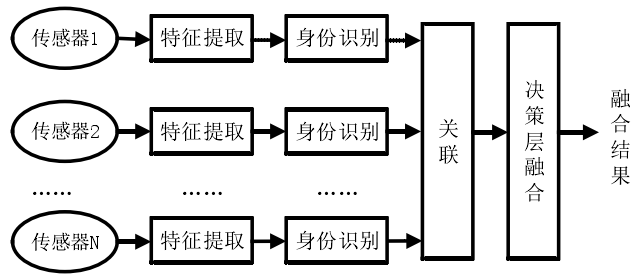
- 损失部分数据,使得融合中心的处理速度更快,实时性更好
- 鲁棒性较好
论文
基于毫米波雷达和相机信息融合的危险目标检测方法研究
主要硬件平台为东风AX7+毫米波雷达+单目相机+MicroAutoBox II+vector记录数据,框架图如下所示:
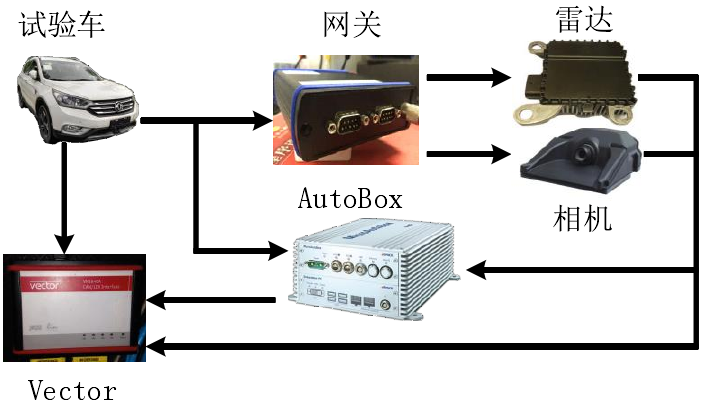
改论文主要通过利用毫米波雷达和相机进行目标检测,随后对目标数据进行特征提取、身份识别以及决策层融合,最后对融合目标进行风险评估和危险目标筛选。
本文融合部分主要的框架如下:
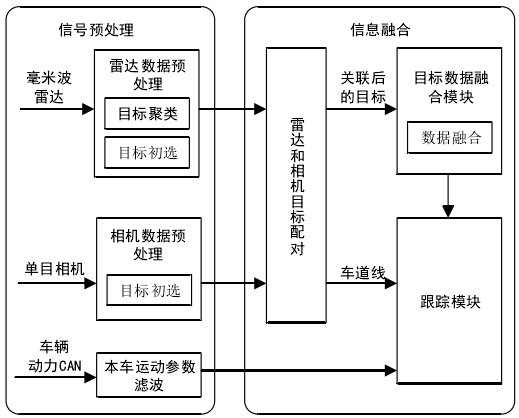
其基本步骤如下所示:
-
传感器数据预处理
-
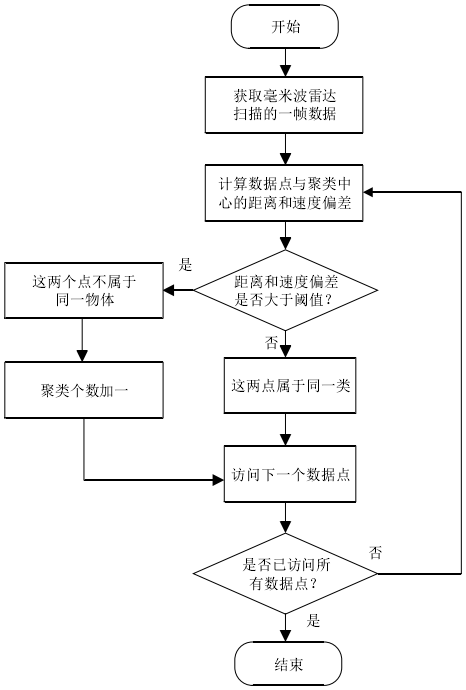
首先通过聚类算法对雷达数据进行聚类分析,将同一物体的多个反射点划分为同一个集群,其流程如下:
-
其次需要排除一些干扰数据(静止目标、空目标、对向行驶汽车、探测范围外的虚假目标、无效目标)
-
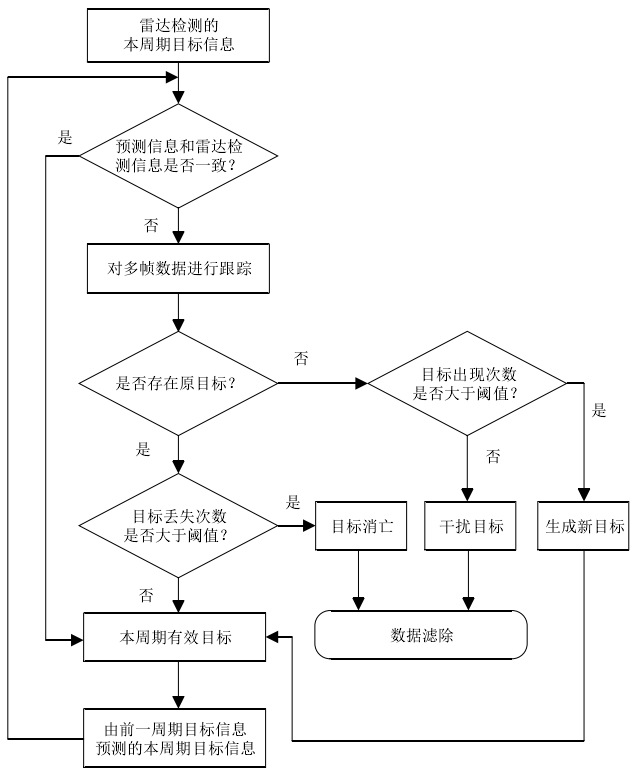
对雷达检测到的目标进行有效生命周期检验,进行有效目标判断,其流程如下:
-
采用激光雷达实车数据进行分析并验证
-
改文章中所采用的相机可以直接输出目标的距离(包含干扰),需要对该部分数据进行滤波,并采用和雷达一样的目标筛选策略进行目标剔除
-
对本车运动学参数采用递推平均滤波法进行滤波(本车运动学参数由专门传感器采集,并用于参考)
-
-
融合算法
- 对各传感器进行时空配准。时间配准采用内插外推法,空间配准需要将各个传感器转化到一个统一坐标系下
- 依据不同传感器的目标列表进行匹配,结果分为三类:相机未匹配目标、雷达未匹配目标、匹配成功目标
- 通过计算不同传感器目标之间的相似度小于某个阈值来表示匹配成功
- 采用同样方法将未匹配目标和各自传感器历史(通过信噪比阈值来确定历史长度)目标进行匹配,未成功即为新目标,并覆盖历史目标中信噪比较低的目标
- 将匹配目标的各种传感器数据进行融合,方法是基于权系数的线性组合
- 对融合后的目标进行跟踪,方法为基于Kalman滤波的目标跟踪
-
制定危险目标策略
-
试验和结果分析
基于车载激光雷达的点云匹配定位
采用国际上最大的自动驾驶场景数据集KITTI中的城市环境点云数据(该点云数据集是三维数据集,64线激光雷达采集),基本流程如下:
- 预处理,然后采用LOAM算法构建出点云地图
- 利用迭代最近点(ICP)算法与正态分布变换(NDT)算法进行单帧点云与点云地图的匹配定位,比对两种算法
- 改进算法,定义为NDT-ICP,结果满足要求,但是实时性不够
一种多传感器组合导航系统的改进异步算法
先简要介绍了基于多尺度思想的多传感器组合导航模型,然后在此基础上给出了在有理数采样率下的多传感器组合导航系统的改进异步最优信息融合算法
基于多尺度的组合导航系统模型
改进的异步多传感器组合导航系统


